 ロボット
ロボット 【ロボット】四足歩行ロボットの動きを確認してみた。その6
#define BLYNK_PRINT Serial#include <ESP8266_Lib.h>#include <BlynkSimpleShieldEsp8266.h>char auth[] = "anatanotokunwoiret...
ロボット 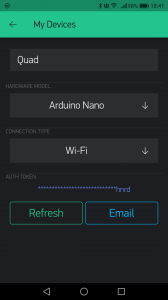 ロボット
ロボット  ロボット
ロボット 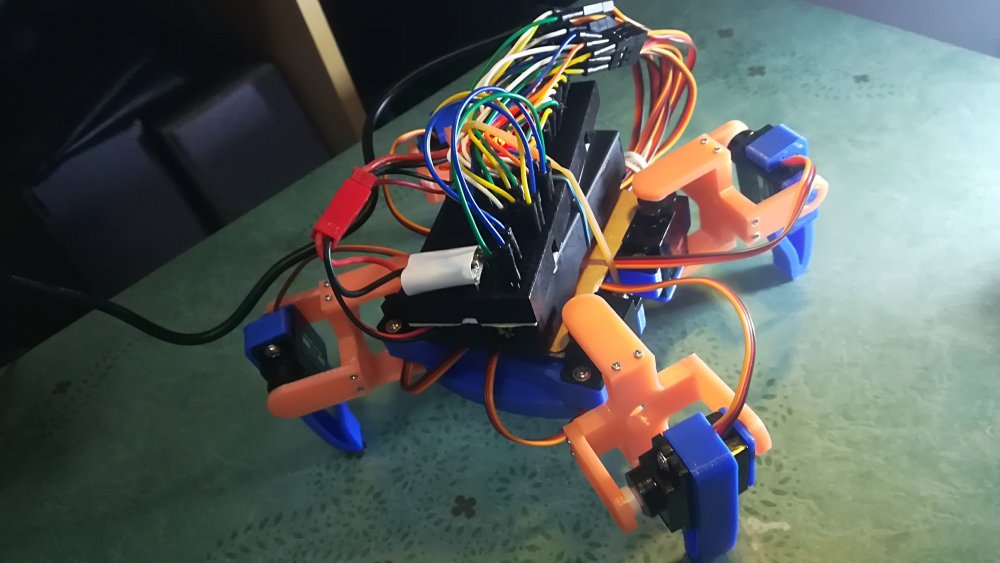 ロボット
ロボット 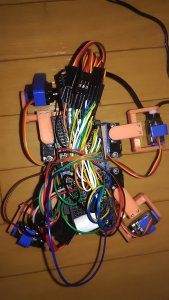 ロボット
ロボット