なんだかゴチャゴチャしてきましたが、足の動きを確認するため、一コマ一コマ撮影してみた。このページは自分の記録用。
マイコンはarduinoUNOからarduinoNanoに変更
参考ブログ
Make: Japan | Arduino搭載四足歩行ロボットのプログラム
足で歩くロボットは面白い。荒れた地面も車輪式のものより上手に踏破できる。動きもいろいろで、動物的でもある。しかし、それだけに歩行ロボットは複雑だ。Makerの手が入れられる部分が少ない。だから私は、歩行ロボットをもっと簡単にしようと考えた。...
makezine.jp
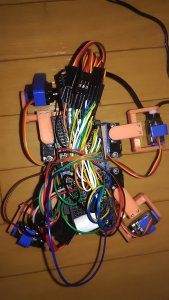
配線がゴチャゴチャしてきた。サーボ8個×3線だけでも24線を接続しなければならない。
とりあえず材料は
- arduinoNano×1
- サーボ×8
- 降圧モジュール(7.4v→5v)×1
- リチウムイオン電池18650×2個
- 電池ケース×1
- 小型ブレッドボード×2
サーボ8個となると、USB供給の電力が足りないため、電池でまかなうこととした。

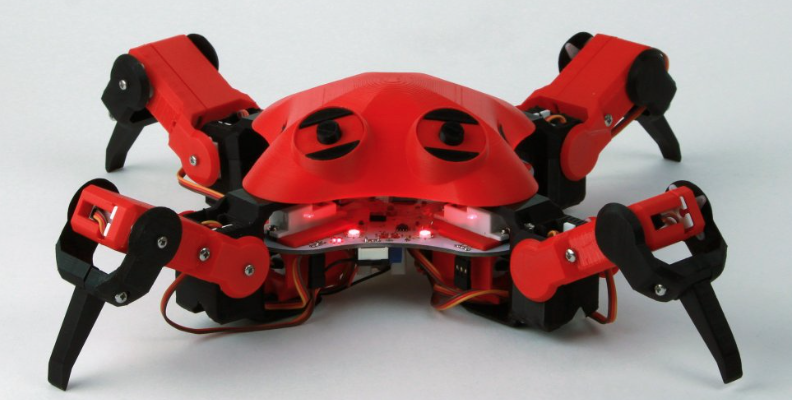
とにかく動きが複雑+安物サーボのため可動範囲にばらつきがあり、確認作業は遅延。。。




理想に近づいてきたけど、まだまだだな。


コメント