無線化にあたってスマホを送信機にしてみた。
今回もBlynkを使ってみた。とにかく良くできたアプリです。
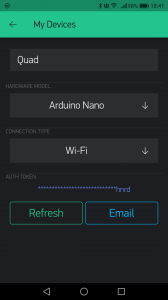
デバイスでarduinoNano、wifiを選択します。


Emailをタップしてトークンをメールに送信します。トークンはスケッチに使用します。
次にJoystickを設置します。設定は-100から+100で良いんじゃないかな。この辺は好みでどうぞ。Meargeを選択すると、「押しっぱなし」効果が得られるので便利かも。

次にボタンを配置します。

これは、PUSHでOK。

レイアウトは適当、下部の4つのボタンは、手を振らせたり、ダンス?させたりするために使います。
設定は以上。ごく簡単。
そのうちソースコードを公開します。


コメント